Introduction:
We are pleased to announce the creation of Sniffest, the student competition for machine olfaction. Sniffest seeks to attract new talent to the machine olfaction community and advance the field by promoting practical and original solutions to odor measurement problems. The edition 2019 of Sniffest will take place during the ISOEN conference, to be held in Fukuoka on May 26-29, 2019. In this edition the challenge is to use Gas sensors in combination with mobile robots!!
Coordinators:
- Haruka Matsukura (Osaka University)
- Oriol Gonzalez (JLM Innovation)
- Hanako Ishida (Tokyo University of Agriculture Technology)
- Akifumi Yamamoto(Tokyo University of Agriculture Technology)
- Sara Beeken (JLM Innovation)
- Hiroshi Ishida (Tokyo University of Agriculture and Technology)
Sponsored by:
The 5 Accepted Teams:
| Team Name | Institution | Country |
|---|---|---|
| MinoS | Universitat Rovira i Virgili | Spain |
| Robodor | University of Brescia | Italy |
| Call of Justice | Kyushu University | Japan |
| ANTT (Active Nose Trail Tracker) | Tokyo University of Agriculture and Technology | Japan |
| DoggyBot | JLM Innovation | Germany |
Rules:
- Only chemical sensors can be used to follow the odor trail, extra information coming from encoders can be used.
- Trans-2-hexenyl acetate (CAS 2497-18-9) is used to make the odor trail. Other chemical compounds including ethanol (CAS 64-17-5) and butyl propionate (CAS 590-01-2) may be used in the rehearsals (Details of the rehearsals will be announced later). Due to the limited availability of trans-2-hexenyl acetate, the coordinators may have to use other chemical compound in the competition.
- The robots must be self-contained, and not externally operated by wire or by remote radio control during the races.
- Except for battery packs, the handlers shall not make any addition, removal, replacement or change to the hardware of the robot during one attempt. It is however permissible to make minor repairs.
- The robots shall not exceed 25 cm in overall length and 25 cm in overall width.
- The robots shall start anywhere within the defined start-finish area. The first and second runs shall be made in the clockwise and counterclockwise directions, respectively. Each team can choose the direction for the third run.
- Within the given performance time (5 min for each attempt), the handlers can retry the attempt arbitrary times. the handlers are allowed to replace batteries and/or upload new program parameters into the robots. The shortest goal time will be recorded for that attempt. The team which recorded the fastest goal time among three attempts wins the competition.
- If the performance time limit is reached and the robot is in the midst of a run, the attempt will be terminated.
- If the robot is unable to complete the run, the longest distance that the robot has travelled along the path will be used to decide the ranking.
- If the robots make a shortcut for more than 40 cm of the odor trail, the attempt is considered invalid and the distance traveled is measured.
Basic Parameters of the Racing Track:
- Bare plywood board surface will be used for the racing track.
- In order to lay a chemical trail, 100% liquid trans-2-hexenyl acetate will be applied directly on the plywood board with a 3 cm wide sponge roller (Figure 1).
- The chemical will be reapplied before each attempt.
- The odor trail will have a sharp corner with an angle of 90°. The other corners will have the minimum curvature radius of 30 cm.
- There is a starting area of 50-cm long in the racing track, as shown in Figure 2. In addition, there is a black starting line at both side of the starting point. The robot can be placed on the line or before it. Start time and end time should be determined when front part of the robot passes the starting line.

Figure 1
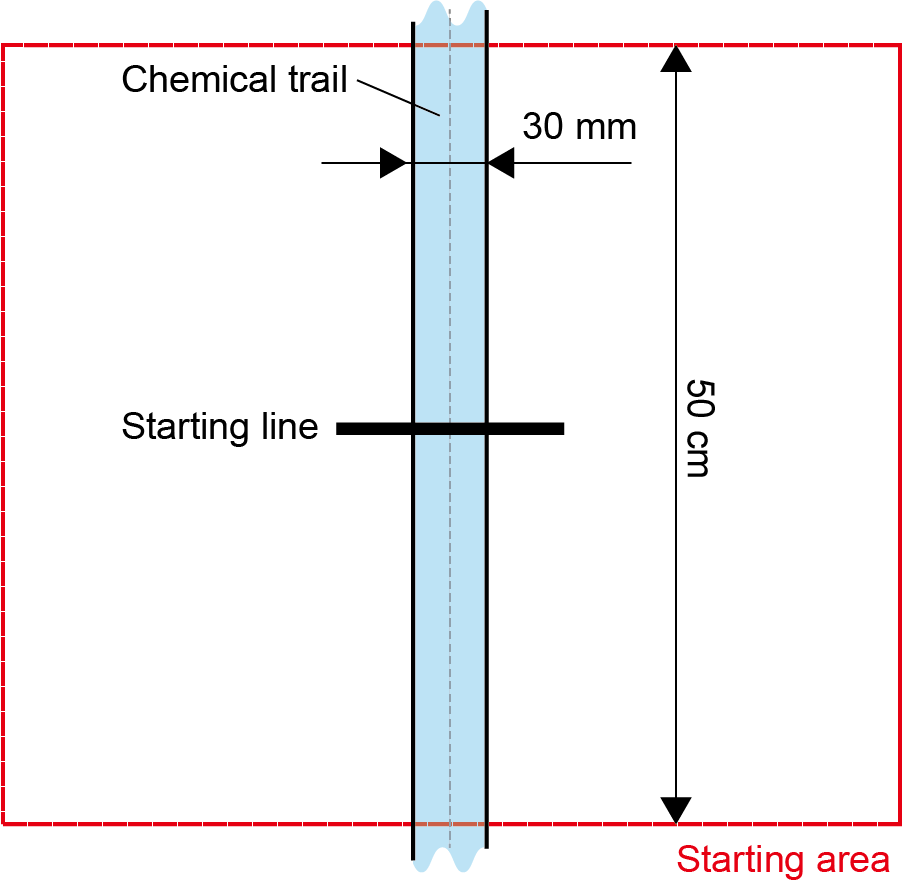
Figure 2
Arena environment:
The competition will be held in a part of the room where the poster sessions will be held. We will try to keep the room ventilated, but the teams have to be prepared for recalibrate the sensors during the race due to the variation in the room contamination.
Poster and brief introduction:
- Each team shall make a poster describing the basic components and the control mechanisms of the robot. The recommended format is A0 portrait: 84.1 cm x 118.9 cm (33.1 in x 46.8 in).
- In the competition, each team shall make a brief introduction about the team and their robot in 2–3 min.
** The rules and conditions are subject to change by the coordinators if necessary
Eligibility:
To be eligible to participate in the event, students must be enrolled in an undergraduate or graduate degree at an accredited university and must be sponsored by a senior researcher (e.g., faculty mentor, industry collaborator).
Students interested in participating must submit an application by the 31st of March 2019. The application must include the following information:
Download the template here, and send it to the following email: [email protected]
A team of technical experts will review applications and invite a small number of teams to participate. Selections will be based on the team’s qualifications, originality and feasibility of the solution. Invitations will be announced by April 5, 2019.
Challenge: Literal Sniffers Race
The robots will be equipped with gas sensors and must follow a circuit as fast as possible.
The circuit will be circular in shape and the same for all teams. Each team will have 3 attempts, and the fastest attempt will win.
Specifications:
- Robot Dimension limits: 25 cm x 25 cm (max)
- Robot can implement as many gas sensors as the team defines
- The team must explain their solution in a poster format (in an special poster session)
- The circuit (an odor trail) will be prepared by applying an liquid odorant on a 1.8 m x 1.8 m arena.
- The arena will be made by placing two plywood boards on the floor. Each board is 1820 mm long, 910 mm wide, and 9 mm thick. Note that unevenness of the floor may create a step of a few millimeters between the two boards. The robot must be able to get over the step.
- The detection target is trans-2-hexenyl acetate (CAS 2497-18-9), which has a green floral smell. A small amount of trans-2-hexenyl acetate in liquid form will be applied to the plywood boards to lay an odor trail that serve as the circuit for this robot competition. Note that the strength of the odor trail will decay over time and also change trial by trial. The robot must be adaptive to the changes in the odor vapor concentration.
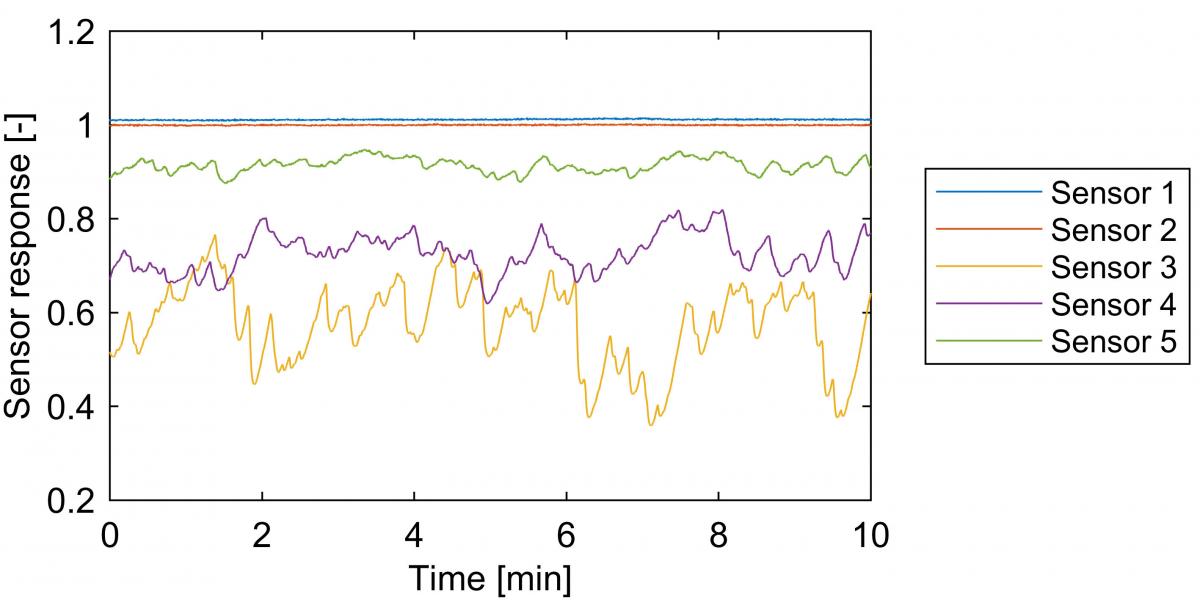
- The attached figure found below shows an example of the gas sensor response to the odorant. Five commercially available metal-oxide gas sensors (TGS2620, Figaro Engineering) are aligned on a plywood board with an interval of 125 mm. The middle sensor (sensor 3) was placed where a drop of trans-2-hexenyl acetate was applied. The horizontal axis shows the time elapsed since the application of the odorant. The vertical axis shows the sensor response, which was defined as the ratio of the sensor resistance in gas to that in air. When the gas concentration increases, the response value decreases. Since there was weak airflow in the room, the sensors on the downwind side (sensors 4 and 5) showed some response to the odor while no response change was observed for the sensors on the upwind side (sensors 1 and 2).
Entrance fee:
Organizers will provide free registration for one student per team and a 50% discount of the student registration rate for additional team members (up to 3) wishing to attend.